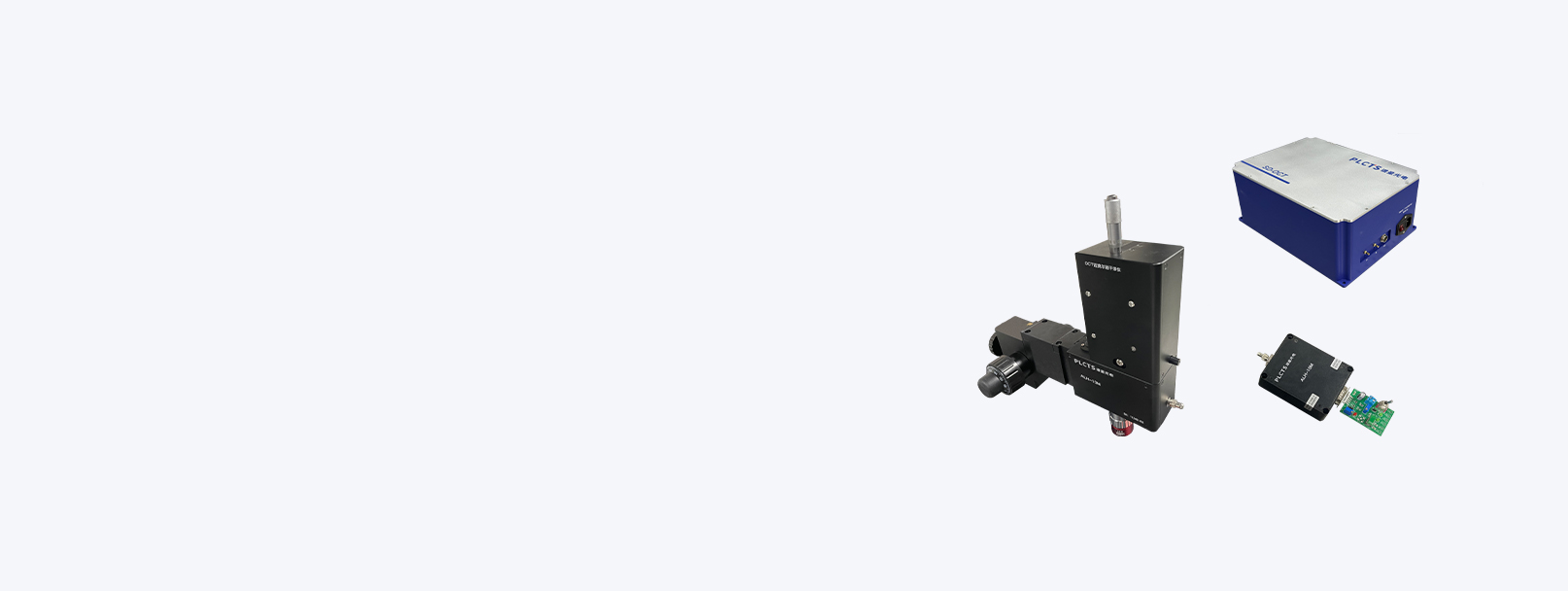
探针台
Probe Stations


想象一下把一个探测器(如光电二极管)直接放在一个LED前面来测量光功率:
1、角度依赖性问题 (Angular Dependence)
(1)LED的光强分布通常遵循朗伯分布(Lambertian Distribution),即正前方最亮,偏离中心角度越远,光强越弱。
(2)探测器测得的数值高度依赖于它相对于LED的角度和距离。偏移一点点,读数就会变化巨大。
问: 那你把它对准正中心不就行了?
答: 即使对准正中心,你也只能得到一个点的数据,无法代表整个发光空间的总能量。总光通量是所有方向光强的积分,一个点的数据无法计算总和。
2、距离依赖性问题 (Distance Dependence)
(1)根据平方反比定律,光照度与距离的平方成反比。
(2)探测器稍微前后移动一点,读数就会剧烈变化。你无法确定一个绝对的“标准测量距离”。
3、空间分布变化问题 (Changing Spatial Distribution)
(1)LED在不同驱动电流下,其发光点的空间分布可能微变。
(2)激光二极管(LD)的发光模式在不同电流下会发生剧烈变化,特别是在阈值电流附近。
(3)直接探测法完全无法捕捉这种空间分布的变化,会导致光功率测量严重失准。
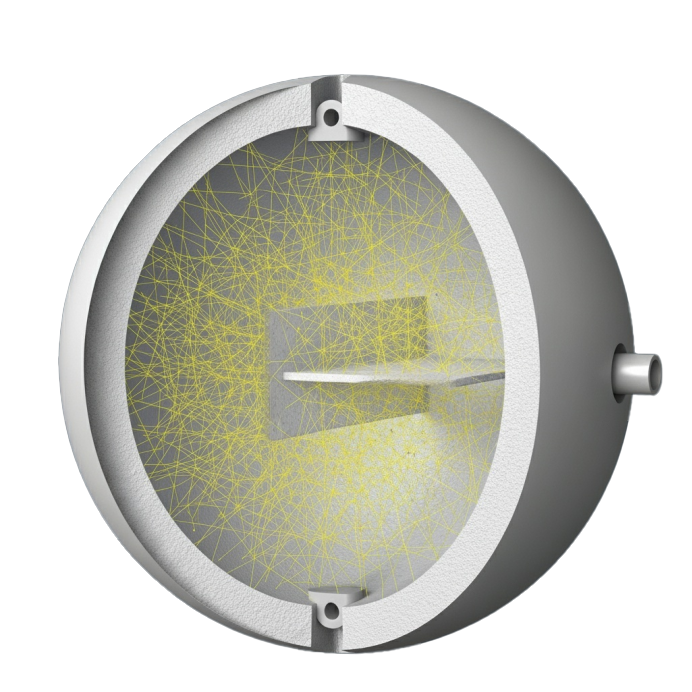
积分球反射示意图
积分球通过其独特的设计,一劳永逸地解决了以上所有问题:
1、空间均匀化 (Spatial Integration)
(1)光进入积分球后,经过内壁漫反射材料的无数次反射,光能均匀地分布在整个球体内。
(2)结果: 无论光源原来的发光角度如何、是否均匀,在球内部都变成了一个均匀发光的“光晕”。探测器放在球壁任何一点(在挡板保护下),测量到的值都只与总光通量有关,而与光的原始空间分布无关。
2、比例测量,结果绝对 (Ratio Metric Measurement)
(1)探测器只测量均匀光场中的一小部分样本光。
(2)由于光场是均匀的,样本光与总光通量之间存在一个固定的比例关系(由球的尺寸、涂层反射率等决定)。
(3)通过用标准校准灯对这个系统进行校准,就能建立探测器读数和绝对光功率(瓦特W或流明lm)之间的精确数学关系。
(4)结果: 测量结果是绝对的、可追溯的光功率值,而不仅仅是一个相对的电压或电流信号。
3、捕捉真实总光通量 (True Total Flux Measurement)
(1)积分球收集的是光源发出的所有方向的光(4π立体角)。
(2)它测量的是器件的总光通量(Luminous Flux) 或总辐射通量(Radiant Flux),这是评价一个光源光学性能的最核心、最真实的参数。
在LIV测试中,我们扫描的是电流(I),同时测量电压(V) 和光功率(L)。
(1)对于电压(V):它基本与测量方式无关,直接通过探针就能准确获取。
(2)对于光功率(L):正如上文所述,它的准确测量极度依赖于能否捕获所有方向的光并消除空间分布的影响。
只有在积分球的帮助下,我们得到的L-I曲线(电光转换效率曲线)才是真实、可靠、可重复的。 我们才能准确读出:
(1)激光器(LD)的阈值电流(Ith)
(2)LED和LD的斜率效率(Slope Efficiency)
(3)器件的饱和特性
(4)在不同电流下的绝对光输出功率
在标准探针台LIV测试中,光功率探头(通常是一个硅光电二极管)直接放置在芯片正上方收集光。这种方法存在几个主要问题,导致测量不准确,尤其是对于LED和VCSEL:
(1)方向性问题:许多光电芯片(特别是LED)发出的光不是平行的,而是有很宽的发散角。直接放置的探测器只能收集到很小一部分立体角内的光,会严重低估总光通量。
(2)空间不均匀性:探测器的响应度在其感光面上可能不是完全均匀的。如果芯片位置稍有偏移,测量结果就会变化,重复性差。
(3)光谱依赖性:简单探测器的响应度会随波长变化。如果芯片的光谱在不同电流下有所变化(如峰值波长漂移),会导致功率测量误差。
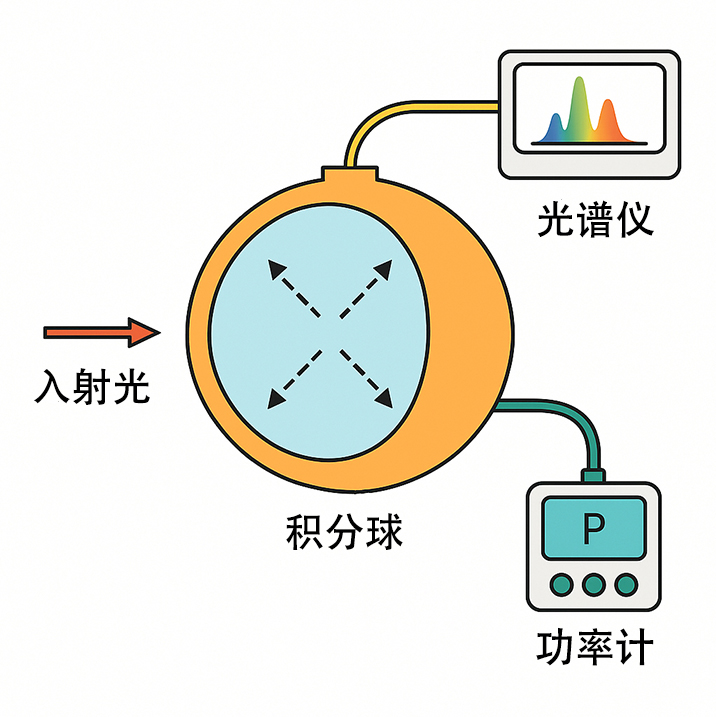
积分球是一个内壁涂有高漫反射材料(如BaSO₄或PTFE)的空心球体。其基本原理是:
(1)光在球内被多次漫反射,使得球内壁上的光照度变得非常均匀。
(2)在球壁上开一个孔放置探测器,探测器测量的是整个球内壁的均匀照度,而这个照度与进入积分球的总光通量成正比。
(3)这样一来,无论光源的发光角度、形状或位置如何,只要所有光都进入球内,探测器测到的信号就只与总光通量有关,从而实现了对总光通量(或总光功率) 的精确、可靠的测量。
整个系统在标准探针台LIV系统的基础上,核心是将积分球集成到探针台中。
组件功能描述:
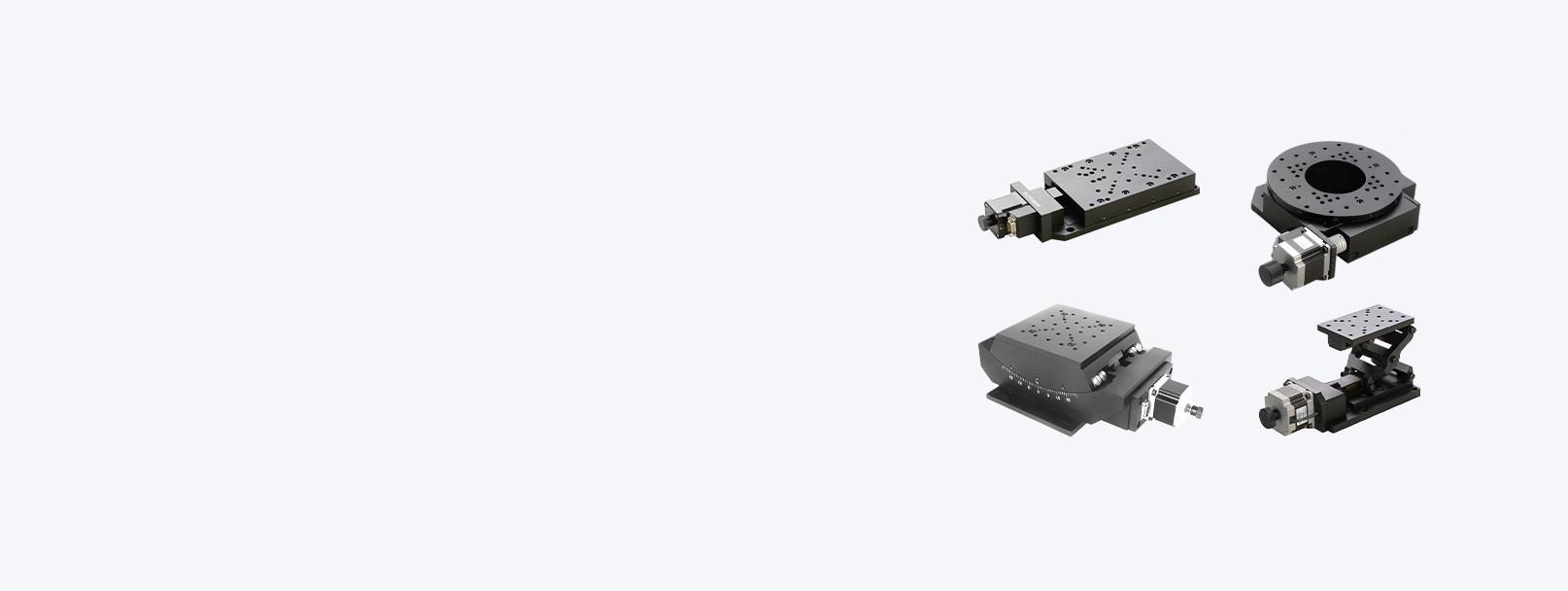
A、 探针台主体:提供精密的XYZ移动平台,用于固定和移动晶圆。
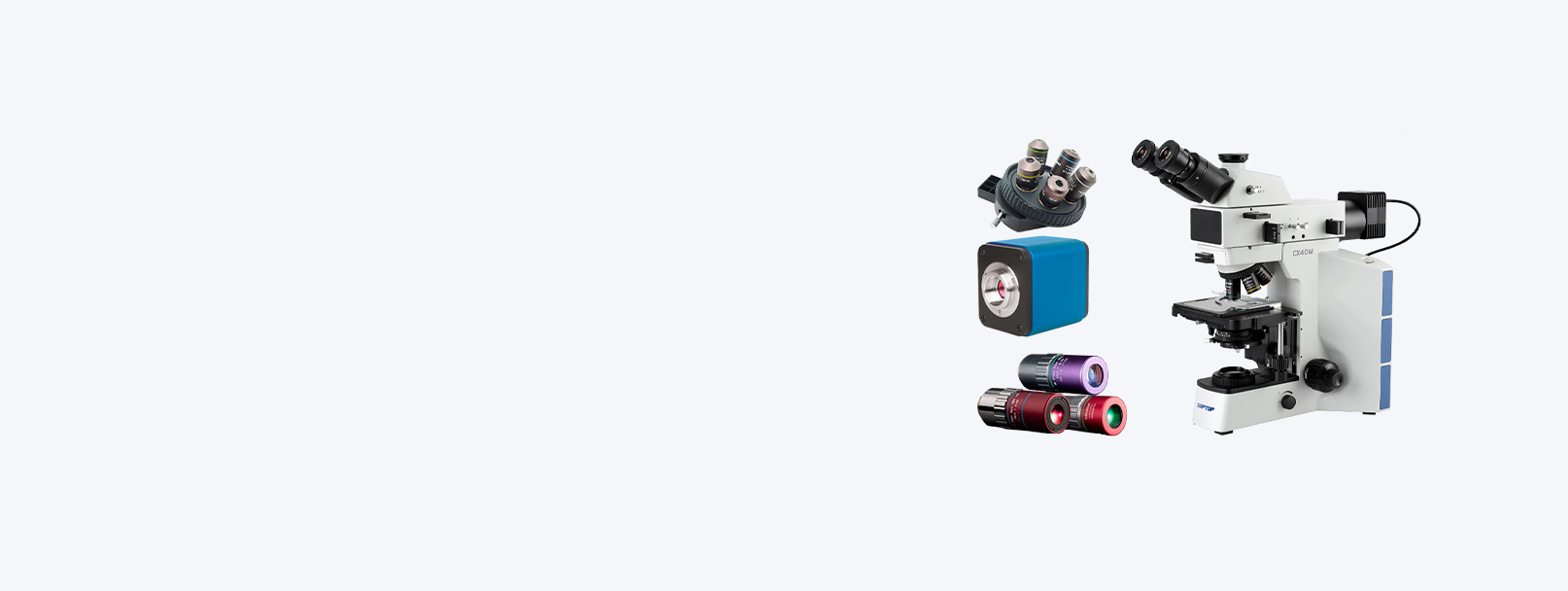
B、 显微镜系统:用于观察和初步定位。由于积分球可能会遮挡视野,通常需要高精度的机械设计或侧视镜头。
C、 精密探针与探针臂:用于给芯片施加电流和测量电压。
D、 源测量单元(SMU):提供扫描电流并同步测量电压和光功率信号(来自积分球后的探测器)。
E、 积分球组件(核心):
(1)功率探测器:安装在积分球的一个端口上,通常是经过校准的硅光电二极管或InGaAs探测器(根据波长选择),来测量分析光功率。
(2)光谱仪光纤接口:光谱仪将光纤传来的光进行色散(分光),投射到CCD/CMOS探测器阵列上,得到每个波长对应的光强信号,即相对光谱功率分布。再结合标准灯校准得到的系统光谱响应函数,计算出绝对光谱功率分布(Absolute SPD)
(3)挡板(Baffle):安装在球内,防止光源的直接光首次反射就进入探测器,确保测量的准确性。
F、 温控系统:高精度测试需要控制芯片温度(通过温控Chuck)。
G、 自动化软件:控制系统,采集I、V、L数据,并分析提取参数。
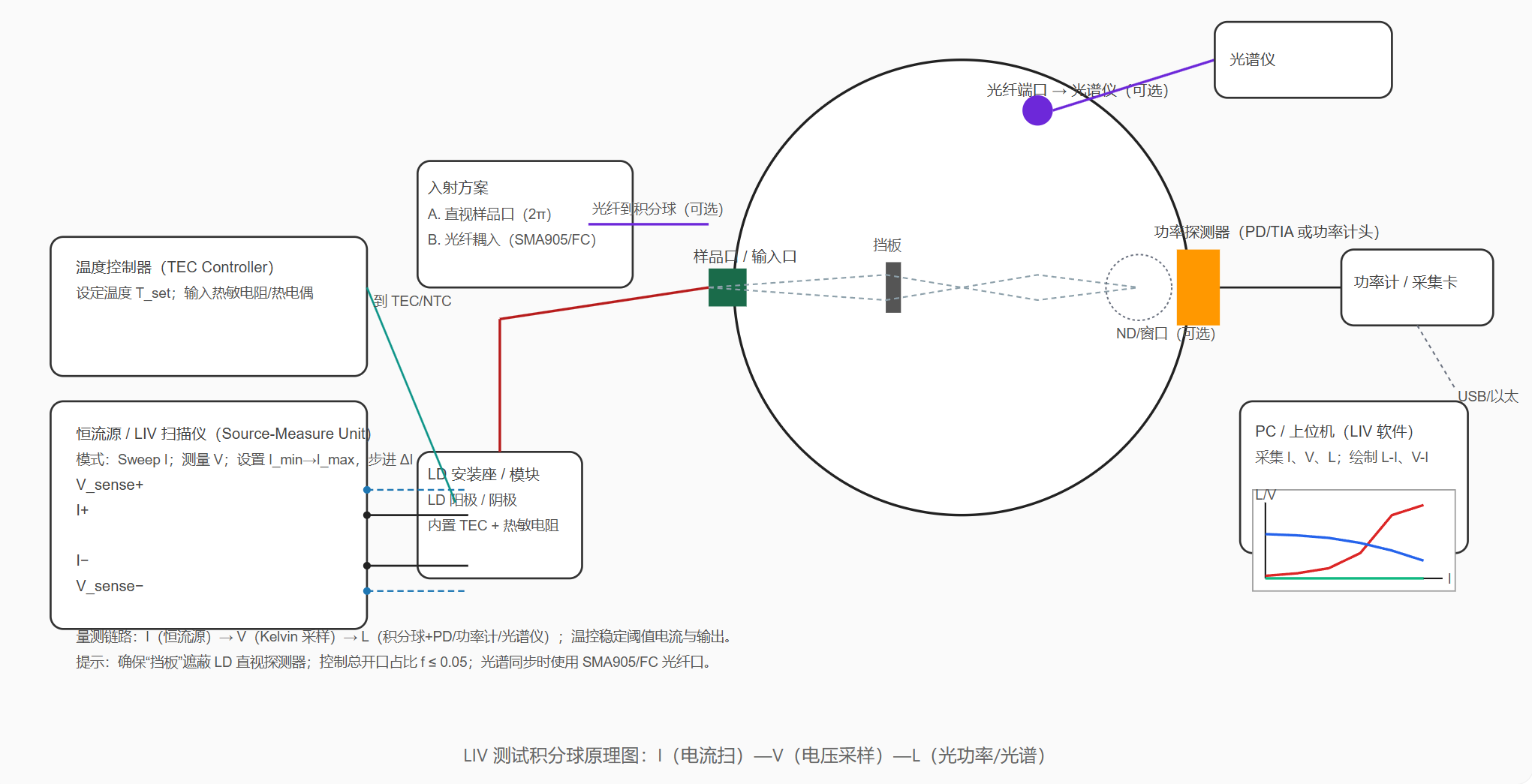
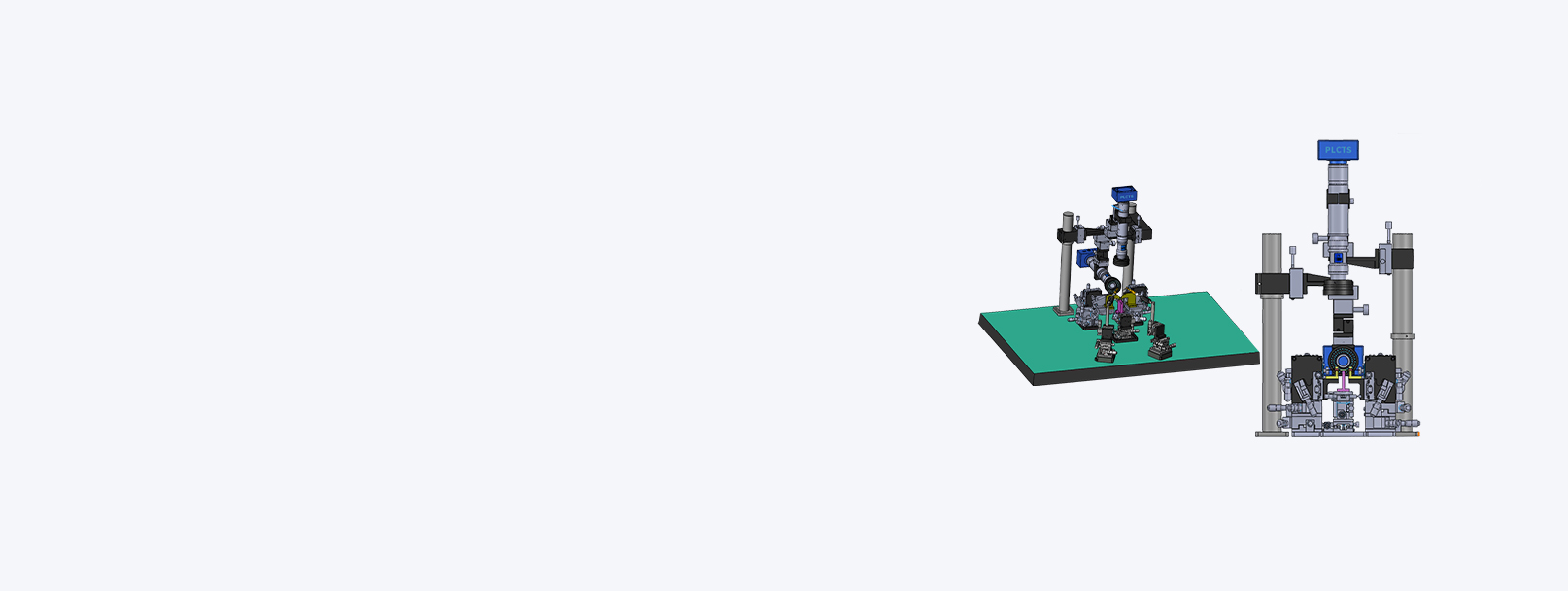
系统组成测试原理图

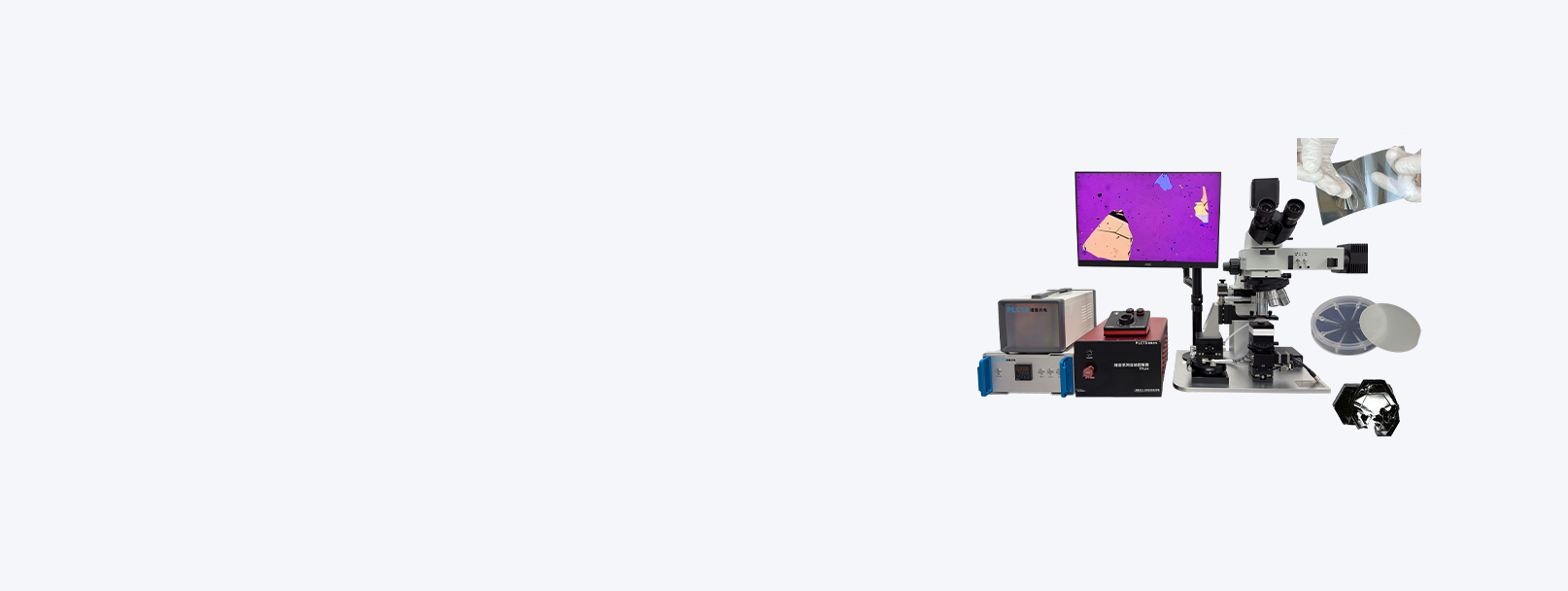
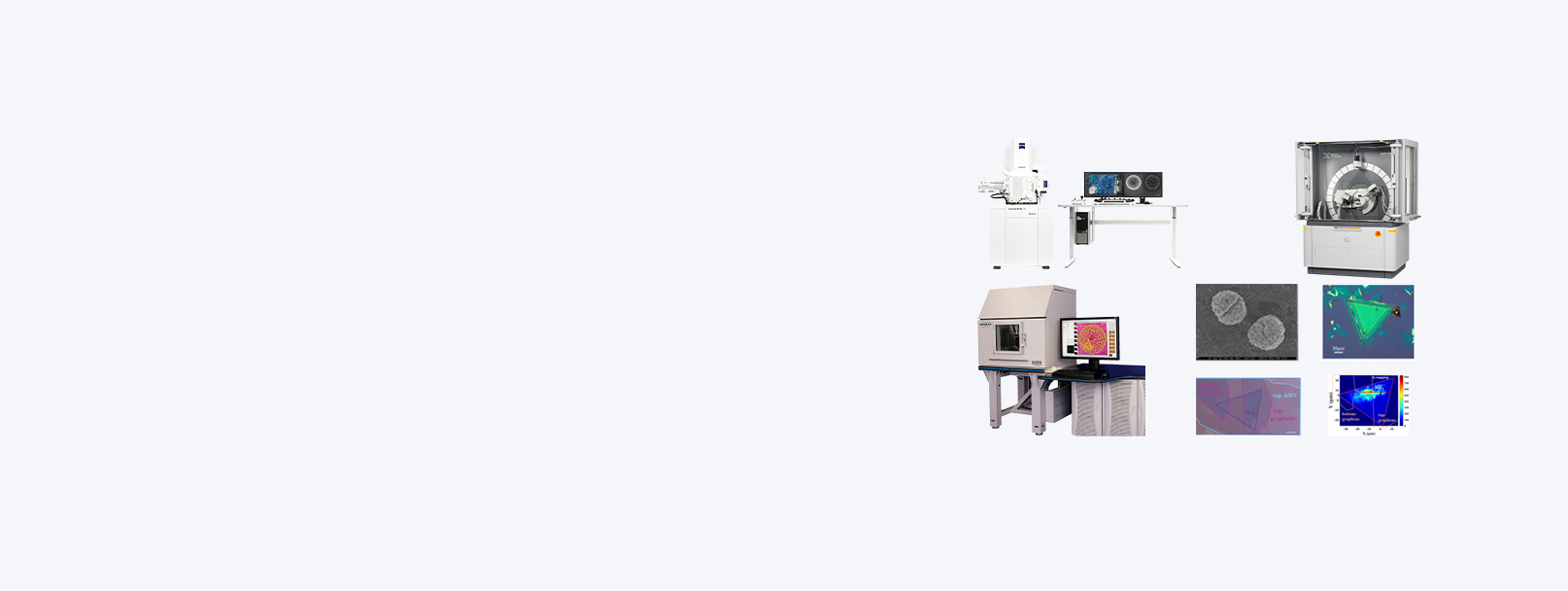
实拍探针台 + 积分球 LIV测试系统示意图
积分球接收反馈示意图
(1)晶圆装载与对准:
A、将晶圆真空吸附在Chuck上。
B、通过软件和显微镜,将第一个Die移动到预定的测试位置。
C、操纵探针,使其精确地扎在芯片的电极Pad上。
(2)积分球定位:
A、使用精密的机械臂,将积分球的底部开口精准地移动到待测芯片的正上方,然后缓缓下降,使积分球轻扣在晶圆表面,形成一个密闭的光学腔体。这样可以确保芯片发出的几乎所有光都被收集到积分球内。
(3)设置测试参数:
A、在软件中设置电流扫描范围(如0-100mA)、步长、compliance电压等。
(4)执行测试与数据采集:
A、启动测试。SMU输出扫描电流(I)。
B、对于每一个电流点,SMU同步测量芯片两端的电压(V)。
C、积分球内的探测器将接收到的光信号转换为电信号,发送给SMU或专门的功率计,被记录为光功率数据(L)。
(5)数据分析:
A、软件实时绘制L-I-V曲线。
B、提取关键参数:
a)光功率(LOP):在特定电流下的总光输出功率(例如在20mA下的光功率),这是积分球提供的最核心、最准确的数据。
b)发光效率(WPE, Wall-Plug Efficiency):计算公式为 (光输出功率 / 电输入功率) * 100%。电输入功率 = I * V。积分球提供了准确的分子,SMU提供了准确的分母。
c)正向电压(Vf):在特定电流下的电压值。
d)阈值电流(Ith,对激光器而言):L-I曲线的拐点。
(6)移动与重复:
A、测试完成后,积分球和探针抬起,Chuck移动至下一个Die,重复整个过程。

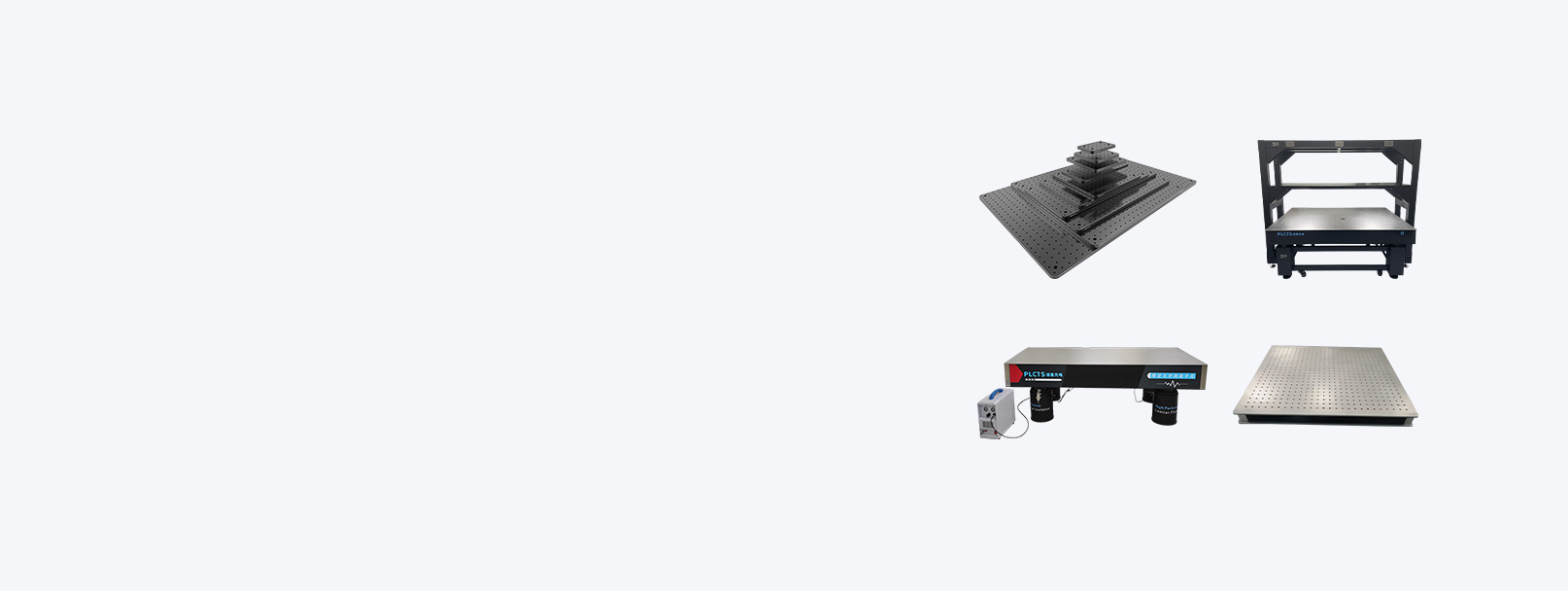
探针台示意图

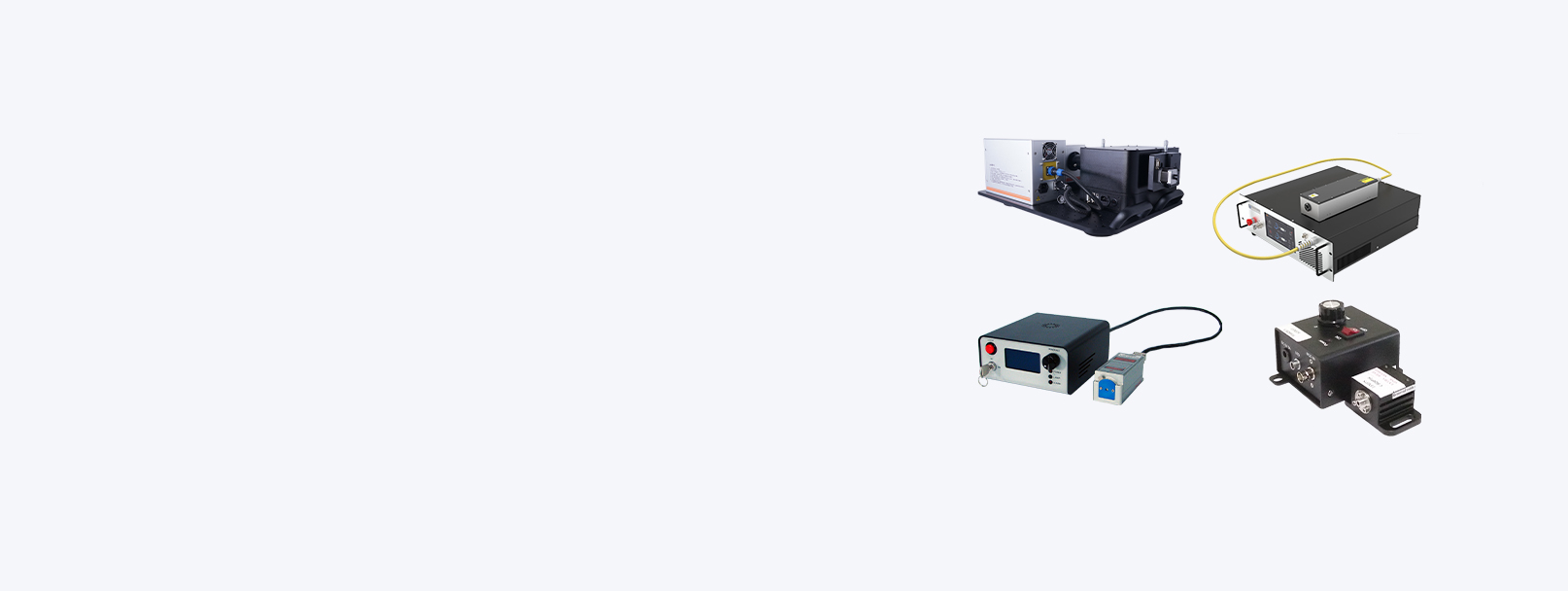
源测量单元(SMU)示意图

光谱仪示意图

LIV测试积分球示意图
专属微信 请扫描二维码添加